UAV on Bridge InspectionsThis research provides an innovative approach for conducting bridge inspections by optimizing an unmanned aerial system (UAS). A rotorcraft prototype, a camera gimbal mechanism, and a workflow is developed in this study. The rotorcraft is used to carry the camera gimbal for capturing images. Since visual inspection is a primary method of evaluating the structural conditions of a bridge, bridge inspectors need to work in dangerous environments. Current methods are time, money, and labour intensive, and can be applied only on large-scale brides due to working space requirements. In order to develop a low-cost and more flexible approach, this research offers an optimized UAS to acquire images of a bridge from underneath, and serve to provide a visual aid for bridge inspectors. An on-board camera gimbal mechanism is developed for acquiring stable image data and remote control. Furthermore, we designed a workflow for using this system based on our field test. To verify the proposed approach, we tested our system on the Hsia-kuei Shan Bridge in Wulai, north of Taiwan. The results showed that the proposed approach can save costs and be efficient for bridge inspections.
|

|

|
Improved UAV for bridge images collectionWe prototyped a six-rotor UAV with a 2 km control radius. The size of the aircraft is 1 m in radius and half a meter in height. It allows 15 minutes of hovering time. The weight of the UAV is about 7 kg, which includes the camera, batteries, and all other mechanics. Since we need to acquire images under the bridge, the camera should be installed on top of the frame
|
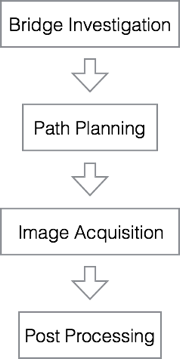
Workflow for UAVs on bridge inspectionsIn order to save preparation time of an inspection, we developed a standard workflow. There are mainly four steps in the workflow: bridge investigation, path planning, image acquisition, and post processing. As soon as the bridge inspectors decide which bridge to inspect, they need to carry out an investigation to determine bridge specifications, such as length, width, structural type, and age. They can then use that information to compute a path plan, and determine aspects such as where to set up the ground station, where to take off from, and how to fly the UAV to capture accurate images. After planning, the bridge inspectors can visit the site and collect the image(s). Finally, they can use those images for post processing and analyze the status of the bridge.
|
|

|
Site ExperimentFor a real case experiment, we chose the Hisa-kuei Shan Bridge as the experimental site. This is a two-lane bridge that crosses the Beishi River, which is located at Wulai, north of Taiwan. The bridge is a small-scale bridge that is 8.5 m in width and 240 m in length. This bridge is also the only passage of traffic connecting the Wulai District and the Xindian District. Due to the scale and the location of the Hsia-kuei Shan Bridge, it is difficult to perform bridge inspections by scaffolding or by using an inspection vehicle. Therefore, it is worthwhile to apply an innovative inspection approach for this bridge.
|









Related publication
C. H. Yang, M. C. Wen, Y. C. Chen and S. C. Kang (2015, Jun). An Optimized Unmanned Aerial System for Bridge Inspection. Proceedings of 2015 International Symposium on Automation and Robotics in Construction and Mining (ISARC), Oulu, Finland.
